


Inside MIDAS: Open-Source Hardware for Dexterous Manipulation
Posted by Mason Knittle on 17th Jun 2026
Open-Source Dexterity for the Robot Learning Era
A tactile, anthropomorphic, DYNAMIXEL-powered robotic hand platform designed for manipulation research, hardware teleoperation, tactile data collection, simulation, and the next wave of robot learning.
|
M I D A S
led and developed by the UCLA Robotics & Mechanisms Laboratory (RoMeLa) |
Robotics moves forward when powerful ideas become buildable platforms. That is what makes the MIDAS Hand especially important. Developed by UCLA RoMeLa, the Robotics & Mechanisms Laboratory led by Dr. Dennis Hong, MIDAS brings together dexterous actuation, dense tactile sensing, open-source mechanical design, simulation assets, and a practical software stack for researchers and builders.
Many robotic hands are impressive as demonstrations, but difficult to reproduce outside the original lab. MIDAS takes a different approach. It is designed as a full research platform: a physical hand, a documented build path, a software interface, a MuJoCo simulation model, a retargeting pipeline, and teleoperation tools that help connect human demonstrations to robot motion.
That matters because modern robot learning is no longer just about commanding a gripper to open and close. Useful manipulation requires contact, compliance, repeatability, sensing, and data. A hand has to move through cluttered physical interaction, respond to object geometry, and provide enough feedback for researchers to study what is happening at the fingertips. MIDAS was built around that reality.
|
16
Total DoF
|
13
Active DoF
|
283
3-Axis Taxels
|
~700 g
Approx. Weight
|
Why Dexterous Hands Are Still Hard
Dexterous manipulation is one of robotics' most difficult problems because a hand is not just an end effector. It is a distributed contact system. Every finger joint changes the shape of the grasp, every fingertip contact changes the force path, and every object introduces new uncertainty. The same motion that works on a rigid block may fail on a cable, tool, bottle, fabric, or soft object.
This is why research platforms matter. A useful dexterous hand needs enough degrees of freedom to express human-like grasp strategies, enough compliance to interact safely with real objects, enough sensing to understand contact, and enough software support to make experiments repeatable. MIDAS combines these pieces into a platform that can be built, studied, modified, and compared across teams.
A Full-Stack Platform, Not Just a Mechanical Hand
The official MIDAS release includes CAD exports, printable files, a parts list, assembly documentation, MuJoCo simulation models, and software repositories for control, retargeting, and teleoperation. That full-stack release is what separates MIDAS from many custom hand builds. Researchers can start with the mechanical design, reproduce the actuator layout, run the hand through the software API, test policies in simulation, and use teleoperation tools to generate demonstrations.
For robot learning, this matters because data collection and deployment are tightly connected. A hand that is difficult to assemble, tune, or simulate becomes a barrier to experimentation. MIDAS lowers that barrier by giving researchers a shared starting point for hardware, software, and contact-rich manipulation workflows.
Powered by ROBOTIS DYNAMIXEL XM335-T323-T Actuators
The DYNAMIXEL XM335-T323-T is a compact, high-precision smart actuator built for dexterous robotic joints, fingers, wrists, and lightweight end-effectors. With a slim 19 × 35 × 22 mm form factor, 4096-pulse resolution, multiple operating modes, and up to 1.03 N·m stall torque at 11.1 V, it delivers smooth motion and advanced control in space-constrained robotic systems. Ideal for robotic hands, manipulation research, teleoperation, and Physical AI development.
 View XM335-T323-T
View XM335-T323-T Why DYNAMIXEL Makes Sense for Open Robotic Hands
Dexterous hands are mechanically dense. The actuator choice has to support compact packaging, repeated motion, clean wiring, and software control without turning the hand into a custom electronics project. DYNAMIXEL actuators help simplify this problem by integrating motor, reduction, controller, driver, feedback, and communication into a compact module.
For open-source robotics, that integration is valuable. It makes the hand easier to source, easier to wire, easier to debug, and easier to reproduce. The MIDAS Hand API is built around the 13-motor DYNAMIXEL architecture and provides low-level actuator communication, a higher-level hand interface, motor homing and calibration tools, and tactile sensor support.
The result is a practical foundation for experimentation: researchers can run pose commands, tune motion behavior, read actuator state, collect tactile measurements, and begin building the higher-level software needed for dexterous manipulation.
Tactile Sensing Is the Difference Between Moving and Manipulating
Vision can tell a robot where an object is, but touch helps reveal what happens when the hand actually makes contact. Is the grasp stable? Is the object slipping? Is the fingertip pressing, shearing, or rolling? Is contact happening where the policy expected it, or somewhere else entirely?
MIDAS integrates 283 three-axis tactile taxels, giving researchers distributed force information across the hand. The thumb includes a larger tactile sensing layout, while the fingers provide dense fingertip feedback for contact-rich experiments. This makes MIDAS especially relevant for tactile data collection, slip-aware grasping, teleoperation, learning from demonstration, and physical AI workflows where the robot must learn from real interaction.
|
Why tactile data matters:
|
The Software Stack: API, Simulation, Retargeting, and Teleoperation
The MIDAS software release is split into focused repositories so builders can use the pieces that match their workflow. The MIDAS Hand API provides the Python interface for the 13-motor DYNAMIXEL hand and Paxini GEN3 tactile sensors. It includes actuator communication, high-level hand commands, homing, calibration, tactile readout, and local tools for tactile visualization, recording, and replay.
The MuJoCo repository provides a whole-hand simulation model with MJCF, URDF, STL meshes, and interactive or headless simulation entrypoints. This is important for policy development, controller testing, and sim-to-real iteration before moving to hardware.
The retargeting repository connects human hand landmarks to MIDAS-specific motion outputs, while the teleoperation repository uses MediaPipe webcam wrappers to produce retargeting inputs and stream commands to print, MuJoCo, or hardware backends. Together, these tools help turn human hand motion into robot demonstrations and hardware control experiments.
APIMotor communication, hand commands, homing, calibration, tactile readout, recording, and replay. |
MuJoCoSimulation model with MJCF, URDF, STL meshes, and interactive or headless workflows. |
RetargetingMIDAS-specific wrappers for mapping human hand landmarks into robot hand commands. |
TeleopMediaPipe webcam pipeline for live calibration, debugging, simulation, and hardware control. |
Designed to Be Built, Not Just Admired
MIDAS is open-source in the practical sense. The project provides source CAD, whole-hand STEP files, printable 3MF plates, a URDF robot model, a parts guide, and assembly documentation. The CAD release includes print packages tested on a Bambu Lab X1C with a 0.4 mm nozzle, using rigid PLA for structural parts and TPU for flexible cover parts.
The assembly guide walks builders through part preparation, DYNAMIXEL ID assignment, finger and thumb assembly, tactile sensor routing, palm closure, board mounting, and final wiring. This level of documentation matters because repeatability is not only a software problem. If two labs cannot build the same physical hand with the same assumptions, their control and learning results become harder to compare.
The official MIDAS parts guide estimates a total BOM around $3,000, with 14 purchased parts and 52 printed parts. By combining purchasable actuation and sensing components with printable mechanical parts, MIDAS gives labs a realistic path from documentation to working hardware.
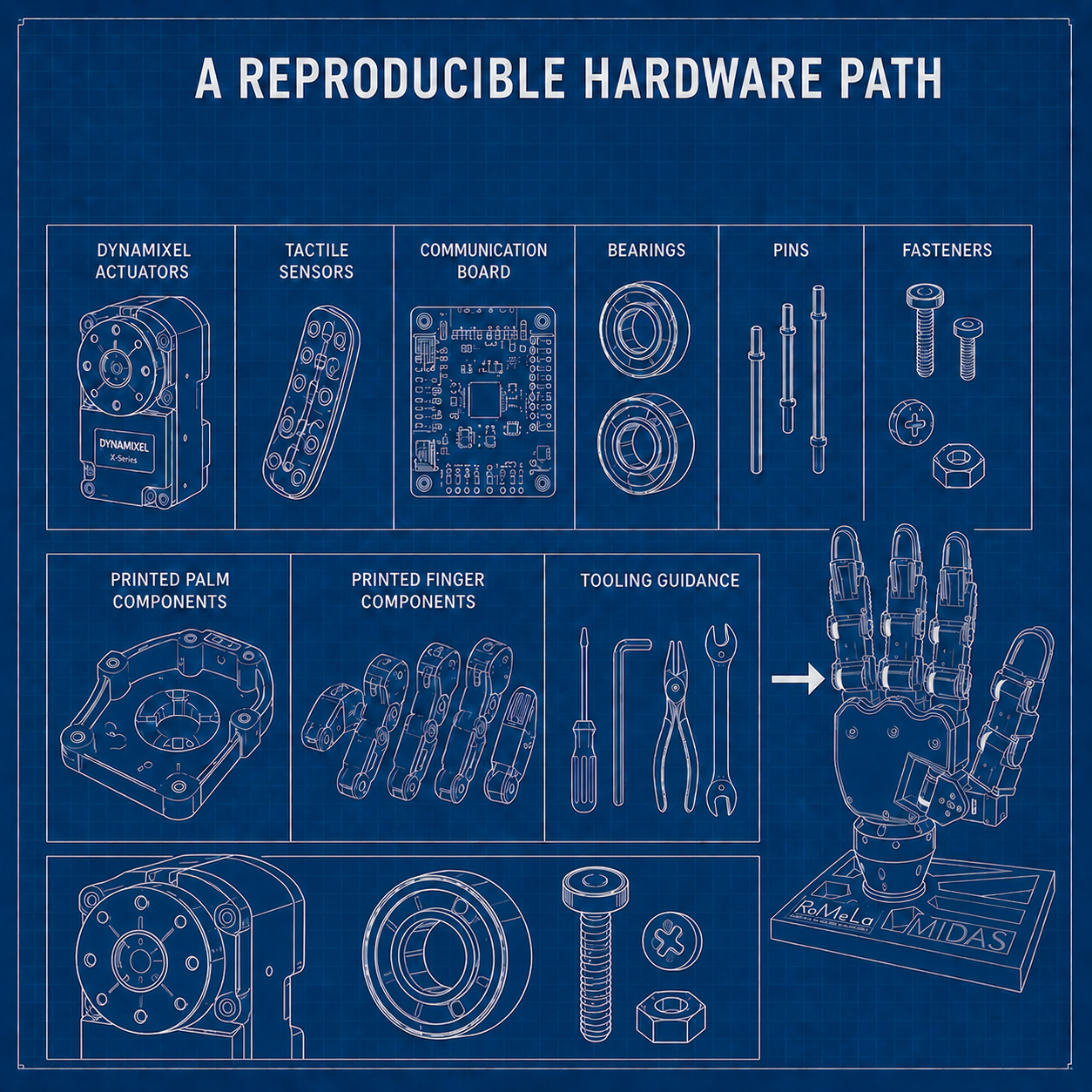 |
A Reproducible Hardware PathThe build path includes DYNAMIXEL actuators, tactile sensors, a communication board, bearings, pins, fasteners, printed palm components, printed finger components, and tooling guidance. For labs, educators, and builders, that sourcing clarity is a major advantage. It reduces friction at the exact point where many open-source hardware projects become difficult to reproduce: turning files into a complete physical system. |
ROBOTIS Bundle: Simplifying the Actuator Stack
To make sourcing easier, ROBOTIS offers the MIDAS Hand Bundle, a DYNAMIXEL and ROBOTIS accessory bundle for builders working with the open-source MIDAS platform. The bundle includes the core ROBOTIS components needed for the hand's actuator and communication stack, including 13 DYNAMIXEL XM335-T323-T actuators, a DYNAMIXEL Starter Kit, and a Robot Cable-X3P 180 mm cable set.
Additional parts, 3D printed components, assembly hardware, tools, and project-specific materials may still be required. However, collecting the actuator stack into a dedicated bundle helps reduce the time builders spend matching part numbers, quantities, and communication accessories.
What Researchers Can Do With MIDAS
MIDAS is built for the problems that define the next stage of robotics research: dexterous manipulation, teleoperation, tactile learning, simulation-to-real transfer, grasp adaptation, and physical AI data collection. It gives teams a hardware platform that can hold, press, slide, stabilize, and interact with real objects while collecting the kind of sensory information that modern learning systems need.
Potential research directions include tactile-aware grasping, learning from demonstration, human-to-robot hand retargeting, manipulation policy training, simulation validation, contact modeling, slip detection, tool use, and humanoid hand integration. Because MIDAS is open-source, teams can also modify the mechanical design, change sensors, adjust the control stack, or integrate the hand into larger robot systems.
Open Hardware, Open Software, and Proper Attribution
The MIDAS release separates licensing by asset type. Hardware and CAD assets are released under the CERN-OHL-P-2.0 permissive open hardware license. Software repositories are released under the MIT License, unless a repository states otherwise. Website and documentation prose are released under CC BY 4.0, while build-critical hardware materials remain under the open hardware license.
For researchers, the project provides a citation entry for the public release and notes that a full paper citation will be added when available. Proper attribution matters because platforms like MIDAS help the community build on shared work while preserving credit for the teams that created the hardware, software, and documentation.
MIDAS Hand Quick Specs
| Full Name | Modular low-Impedance Direct-drive Anthropomorphic Sensing Hand |
| Degrees of Freedom | 16 total DoF / 13 active DoF |
| Actuation | 13 ROBOTIS DYNAMIXEL XM335-T323-T actuators |
| Tactile Sensing | 283 three-axis tactile taxels |
| Approximate Weight | ~700 g |
| Approximate BOM Cost | ~$3,000, depending on sourcing and availability |
| Build Time | Official project estimate: < 3 hours, depending on build preparation and experience |
| Release Assets | CAD, printable files, BOM, assembly documentation, MuJoCo simulation, API, retargeting, and teleoperation repositories |
| Applications | Manipulation, teleoperation, tactile data collection, simulation, robot learning, and sim-to-real development |
Build Dexterity. Sense Contact. Learn Manipulation.
MIDAS gives the robotics community something rare: a dexterous hand that can be built, sensed, simulated, teleoperated, and improved by the people using it. For researchers working on physical AI, manipulation, and tactile robot learning, that reproducibility may be the most important feature of all.
Visit MIDAS Hand Explore GitHub View ROBOTIS BundleMIDAS Hand: https://midas-hand.com/
MIDAS Software: https://midas-hand.com/software.html
MIDAS Citation & Licensing: https://midas-hand.com/citation.html
MIDAS GitHub: https://github.com/midas-hand-org
ROBOTIS MIDAS Hand Bundle: https://www.robotis.us/midas-hand-bundle/
UCLA RoMeLa: https://www.romela.org/