

There are no products listed under this category.
DYNAMIXEL-Q
Coming Soon / QDD Smart Actuators
DYNAMIXEL-Q
DYNAMIXEL-Q is ROBOTIS’ upcoming QDD actuator platform for humanoids, dynamic robotics, and next-generation Physical AI systems.
Built around Quasi-Direct Drive architecture, DYNAMIXEL-Q is designed for high backdrivability, low impedance, precise torque control, and real-world motion where contact, balance, and compliance matter.
Product Teaser:
DYNAMIXEL-Q is an upcoming product line. Specifications, availability, model names, and release timing may change as the product approaches launch.
QDD Architecture
Quasi-Direct Drive design for dynamic, compliant, and torque-aware robotic motion.
Torque-Level Control
Designed for precise torque control in humanoids, balancing robots, and legged systems.
Low Impedance
Supports natural interaction, safer contact behavior, and dynamic physical movement.
Physical AI Ready
Built for sim-to-real, imitation learning, reinforcement learning, and real-world deployment.
Built for Real-World Physical AI
Physical AI needs robots that can move through contact, recover from disturbances, and learn from real dynamics — not just simulation. DYNAMIXEL-Q is being developed as a QDD actuator platform for robots that need backdrivable, torque-aware, and compliant movement.
- Designed for dynamic humanoid motion and balance control
- Supports torque-aware behavior for contact-rich robotics
- Helps reduce the gap between simulation and real hardware
- Built for imitation learning and reinforcement learning workflows
- Used in AI Sapiens K0, ROBOTIS’ open-source humanoid Physical AI platform

AI Sapiens Demonstration
Dynamic Humanoid Motion Powered by DYNAMIXEL-Q
AI Sapiens showcases the type of dynamic balancing, compliant motion, teleoperation, and Physical AI workflows DYNAMIXEL-Q is designed to enable.
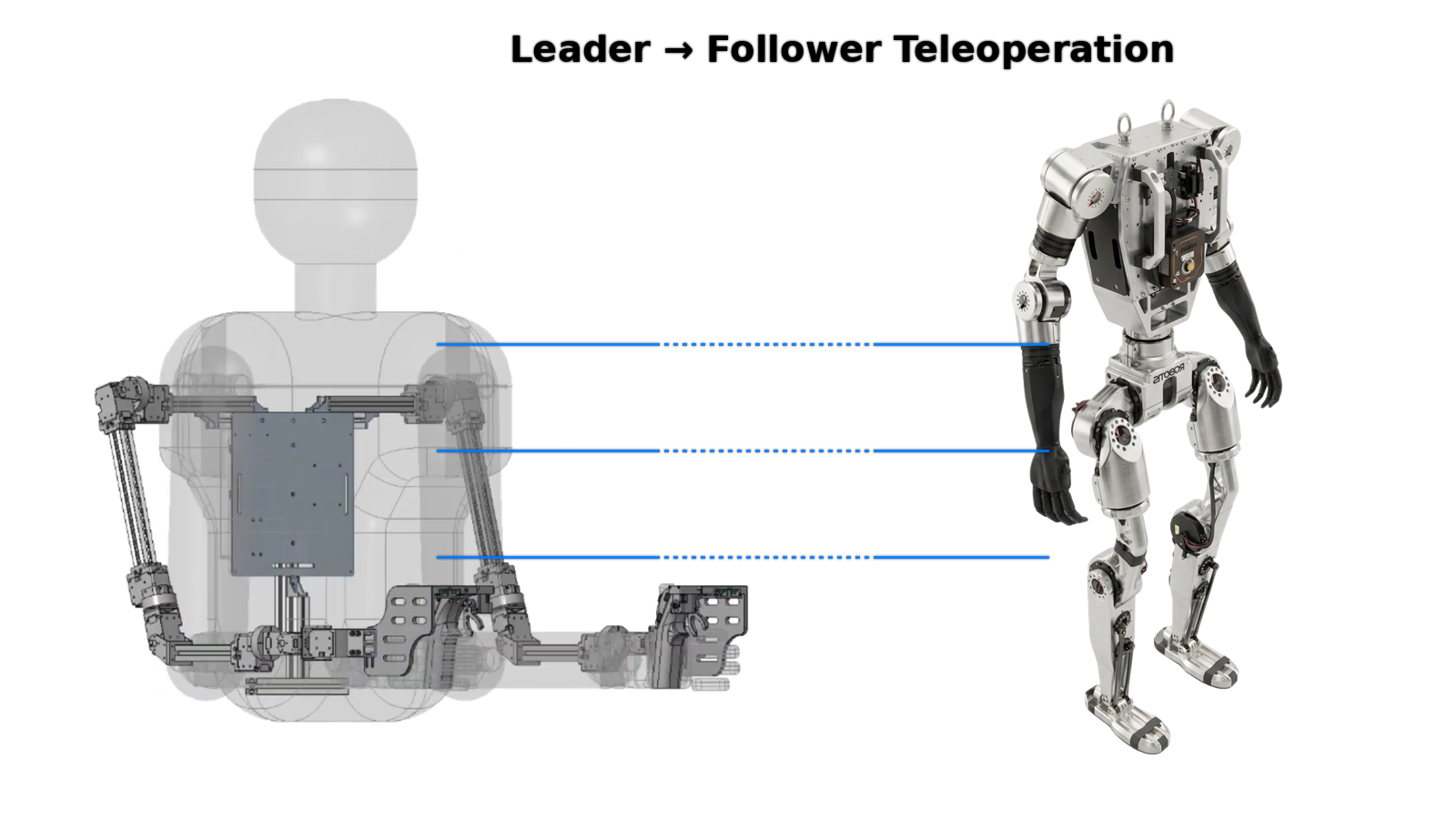
From Teleoperation to Real Robot Learning
AI Sapiens demonstrates the kind of workflow DYNAMIXEL-Q is designed to support: collect demonstrations, train policies, deploy them to real hardware, and continue improving through real-world robot behavior.
- Leader-follower teleoperation for demonstration capture
- Data collection, training, and inference workflows
- Simulation and real-world deployment for sim-to-real iteration
- Humanoid motion powered by DYNAMIXEL-Q actuators
DYNAMIXEL-Q Preview Models
Early DYNAMIXEL-Q references include QM-060 and QM-080 actuators used in AI Sapiens K0.
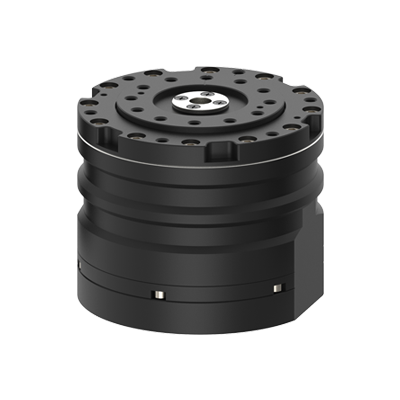
Compact QDD Actuator
QM-060
Inner rotor motor, 48 V input, selectable gear ratios, compact Ø58 × 60 mm body, 450 g weight, and Ø5 mm hollow bore.
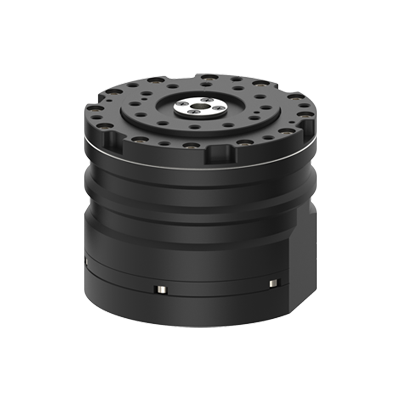
Larger QDD Actuator
QM-080
Inner rotor motor, 48 V input, selectable gear ratios, Ø78 × 65 mm body, 850 g weight, and Ø7 mm hollow bore.
Early Preview Specifications
| Model | Motor Type | Input Voltage | Gear Ratio | Size | Weight | Hollow Bore |
|---|---|---|---|---|---|---|
| QM-060 | Inner Rotor | 48 V | 12:1 / 16:1 / 20:1 | Ø58 × 60 mm | 450 g | Ø5 mm |
| QM-080 | Inner Rotor | 48 V | 12:1 / 16:1 / 20:1 | Ø78 × 65 mm | 850 g | Ø7 mm |
| Upcoming Model | More info available soon | |||||
| Upcoming Model | More info available soon | |||||
Coming Soon
Get Ready for DYNAMIXEL-Q
DYNAMIXEL-Q is being developed for the next generation of Physical AI robots: humanoids, legged systems, dynamic manipulators, and real-world learning platforms.
Contact Us for Updates