

XM Series
The DYNAMIXEL XM Series is a high-performance smart actuator lineup designed for advanced robotics, Physical AI, robot arms, humanoids, mobile manipulators, and research platforms that need high torque, precise feedback, and force-aware motion.
With full metal gears, current-based control, encoder feedback, and DYNAMIXEL networking, XM actuators can support the real-world data collection loops behind imitation learning, teleoperation, reinforcement learning, and embodied AI development.

Built for Physical AI
A strong actuator choice for embodied AI systems that learn from real-world motion, interaction, and demonstration data.
Data Flywheel Ready
Use XM-powered robots to collect motion, position, velocity, load, and current data that can improve future policies and robot behavior.
Force-Aware Control
Current and current-based position control help robots interact more intelligently with objects, humans, and changing environments.
High-Torque Metal Gear Platform
Full metal gears and high torque output make XM actuators suitable for durable robot joints and manipulation tasks.
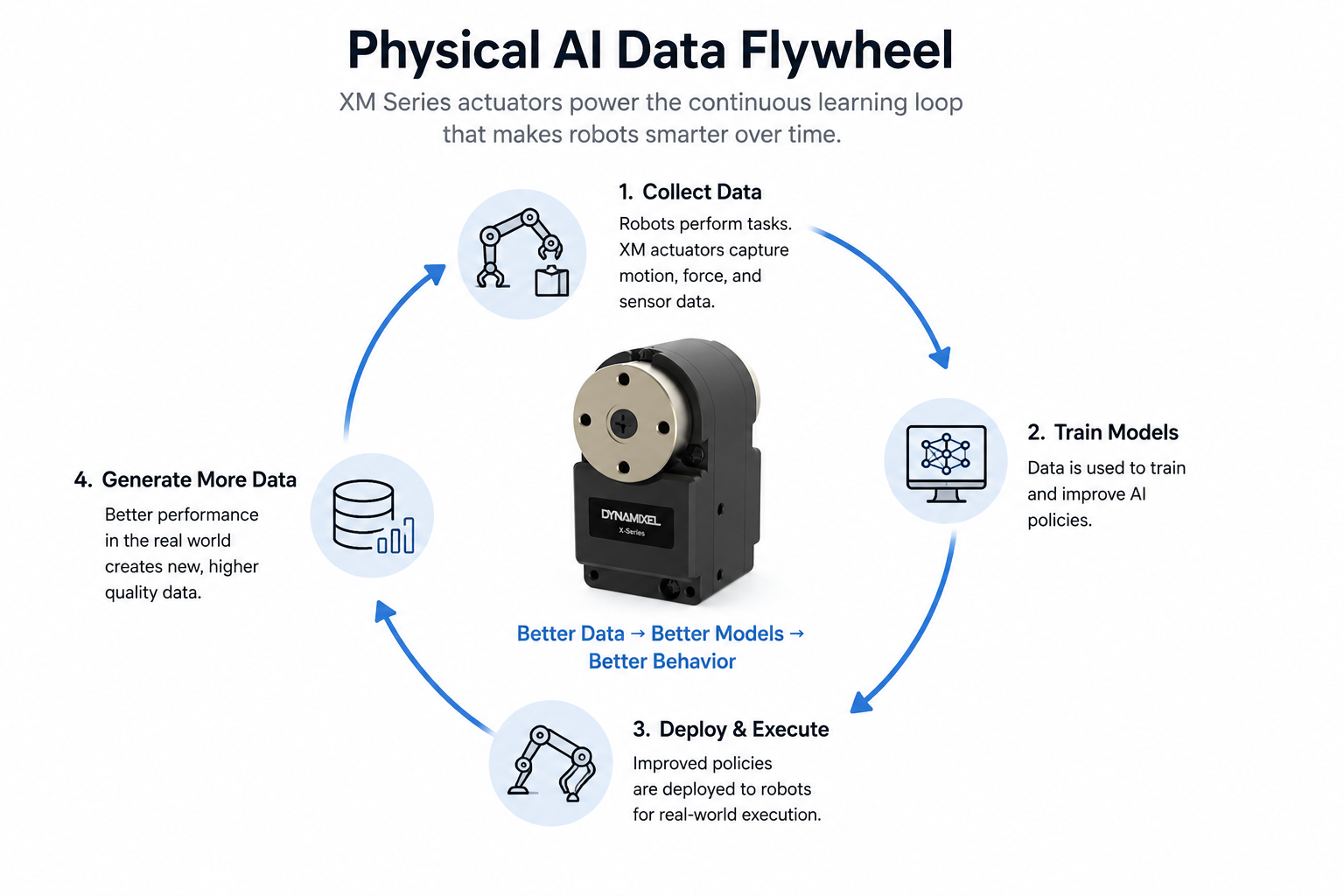
Powering the Physical AI Data Loop
Physical AI depends on robots that can act, sense, record, and improve. XM Series actuators help form that foundation by combining reliable motion output with feedback data that can be used for teleoperation, imitation learning, policy testing, and iterative robot training.
- Collect real-world motion data from robot joints and manipulators
- Support imitation learning and teleoperation workflows
- Use current feedback for force-aware interaction and safer contact behavior
- Enable repeatable testing for sim-to-real and policy improvement loops
Choose the Right XM Series Model
Maximum torque XM540 model with up to 12.9 N·m stall torque at 14.8 V.
Higher speed XM540 model with up to 66 rpm no-load speed at 14.8 V.
Strong mid-size actuator for robot arms, mobile manipulators, and embodied AI research.
Compact XM actuator for smaller intelligent robots, learning platforms, and data collection systems.
Advanced Motion & Force Control
The XM Series supports advanced DYNAMIXEL operating modes including Velocity Control, Position Control, Extended Position Control, PWM Control, Current Control, and Current-Based Position Control. These modes are especially useful for robots that need compliant motion, force-aware behavior, and repeatable data collection.
XM Series Specifications
| Model | Stall Torque | No Load Speed |
|---|---|---|
| XM540-W270-T/R | 10.0 N·m @ 11.1 V 10.6 N·m @ 12.0 V 12.9 N·m @ 14.8 V |
28 rpm @ 11.1 V 30 rpm @ 12.0 V 37 rpm @ 14.8 V |
| XM540-W150-T/R | 6.9 N·m @ 11.1 V 7.3 N·m @ 12.0 V 8.9 N·m @ 14.8 V |
50 rpm @ 11.1 V 53 rpm @ 12.0 V 66 rpm @ 14.8 V |
| XM430-W350-T/R | 3.8 N·m @ 11.1 V 4.1 N·m @ 12.0 V 4.8 N·m @ 14.8 V |
43 rpm @ 11.1 V 46 rpm @ 12.0 V 57 rpm @ 14.8 V |
| XM430-W210-T/R | 2.7 N·m @ 11.1 V 3.0 N·m @ 12.0 V 3.7 N·m @ 14.8 V |
70 rpm @ 11.1 V 77 rpm @ 12.0 V 95 rpm @ 14.8 V |
| XM335-T323-T | 0.85 N·m @ 9.0 V 1.03 N·m @ 11.1 V 1.12 N·m @ 12.0 V |
43 rpm @ 9.0 V 53 rpm @ 11.1 V 57 rpm @ 12.0 V |