

5 Futuristic DYNAMIXEL Robots You Can Build Today
15th Jul 2024
Much of the conversation today about robotics is focused on the future of the industry, with everybody speculating on how far the next generation of robotics will be able to go. Oftentimes, this mode of thinking might encourage us to overlook many of the most impressive robotics available now. Today, I want to introduce you to a few DYNAMIXEL powered robots that you can build today that are not only fascinating in their complexity but also demonstrate the robustness and versatility of modern robotics. These robots are examples of the immense potential of DYNAMIXEL actuators, capable of delivering power, precision, and programmability that can bring even the most ambitious robotic designs to life.
ALOHA 2
In the pursuit of making robotic technology more accessible, the ALOHA 2 project stands as a testament to the synergies of innovation and collaboration. Born from the collective efforts of a dedicated team from Google, Stanford, and Hoku Labs, ALOHA 2 is an enhanced low-cost hardware system designed to facilitate bimanual teleoperation. This project is a significant stride in robot learning, pushing the boundaries of data-driven advances by addressing challenges in hardware cost, robustness, and ease of teleoperation.
The ALOHA 2 system builds upon the strengths of its predecessor while delivering improved performance, ergonomics, and robustness. Key enhancements include optimizing grippers and controllers for an expanded range of manipulation tasks, prioritizing user experience with responsive and ergonomic design, and boosting system robustness to reduce downtime.
One of the defining features of ALOHA 2 is its redesigned grippers featuring a new low-friction rail design for both the leader and follower grippers. This not only improves the teleoperation ergonomics but also enhances the latency and force output of the grippers. In addition, the grip tape material on the fingers has been upgraded to ensure better durability and grasp of small objects.
Further improvements include the introduction of a passive gravity compensation mechanism, a simplified frame design, and the use of compact Intel RealSense D405 cameras for a more refined view. Furthermore, the exact specifications of the ALOHA 2 robot are modelled in a MuJoCo model in MuJoCo Menagerie, facilitating improved data collection, policy learning, and evaluation for challenging manipulation tasks.
The ALOHA 2 project is an exciting example of the potential of home robotics projects, blending innovation and practicality. Its focus on user-friendliness and robustness makes it a compelling model for those interested in exploring the dynamic world of robotics, offering a stepping stone for further advancements in the field.
Mini BDX Droid
For aspiring home robotics enthusiasts looking to bring a touch of the cinematic to their projects, the Mini BDX Droid project is an engaging and fun endeavor. This project is a personal endeavour to create a scaled-down version of Disney's iconic BDX Droid, standing at a compact 35 centimeters with its legs fully extended.
The creator uses a custom walk engine based on an old Rhoban walk, and the Inverse Kinematics (IK) is based on placo. In an exciting twist, the robot can be controlled using an Xbox controller in the MuJoCo environment, allowing you to direct its movements and even control the head pitch, yaw, and height.
The fun doesn't stop there, with the groundwork already in place to implement Reinforcement Learning for gait and animations. Software installation is simple and straightforward with pip, and the creator provides helpful links to the key components needed for the project.
Despite being a work in progress, the Mini BDX Droid project is a testament to the creative potential that exists within the realm of home robotics. With its interactive capabilities, scaled-down complexity, and the unmistakable charm of a beloved droid, this project offers an exciting and accessible entry point into the world of robotics.
TurtleBot3 Friends
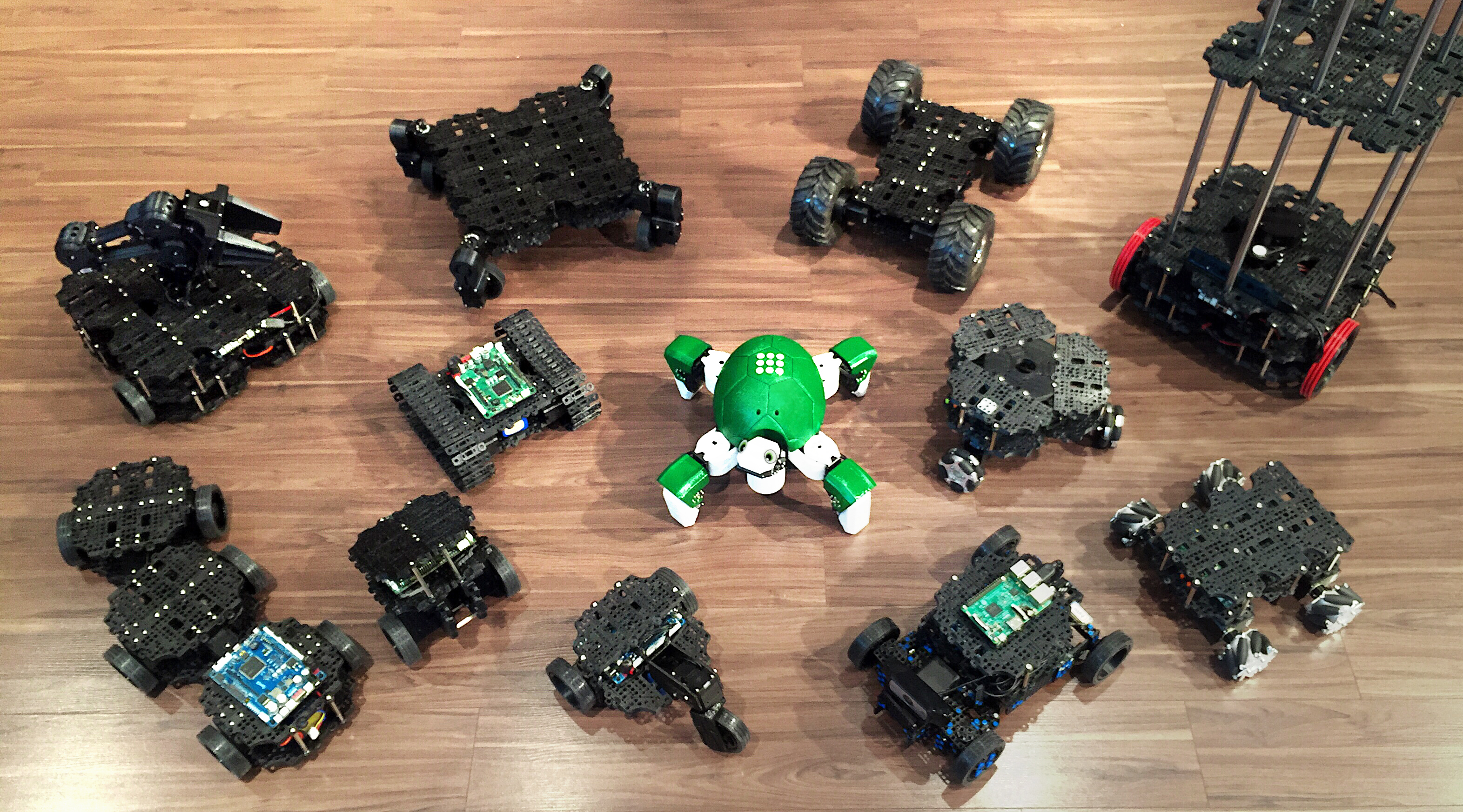
These DIY projects are built around the versatile TurtleBot3, a popular platform among hobbyists and educators who want to learn more about robotics, AI, and programming. Each "Friend" is a unique embodiment of TurtleBot3's capabilities, demonstrating a wide array of robots you can create with just a few additional parts. The possibilities are as diverse as your imagination, from a race car, 4 DOF manipulator for picking and placing objects, a Segway robot with a balancing PID controller, a futuristic vehicle with four joints and four wheels for efficient transportation, or even a tank with rough terrain capabilities.
The TurtleBot3 Friends project offers the flexibility for you to experiment with different types of drive wheels such as Omni and Mecanum, a 'Road Train' that can connect multiple vehicles or a 'Real TurtleBot' resembling a four-legged creature. The 'Carrier', a 2-wheel mobile platform, is also an option for those interested in service robots.
Despite their varied forms and functions, each TurtleBot3 Friend utilizes the same components: DYNAMIXEL X 430 Series motors, an OpenCR1.0 Board, and a TurtleBot3 chassis and battery. With the availability of 3D printed parts and a comprehensive Bill of Materials (BOM), you can easily source the necessary components to begin building your TurtleBot3 Friend.
What makes this project particularly exciting is that you not only learn technical skills like coding and assembly, but also tap into your creativity to design and build a robot with its unique features and applications. So, dive into the world of TurtleBot3 Friends. Assemble, code, play, and see what fun and inventive 'friends' you can create!
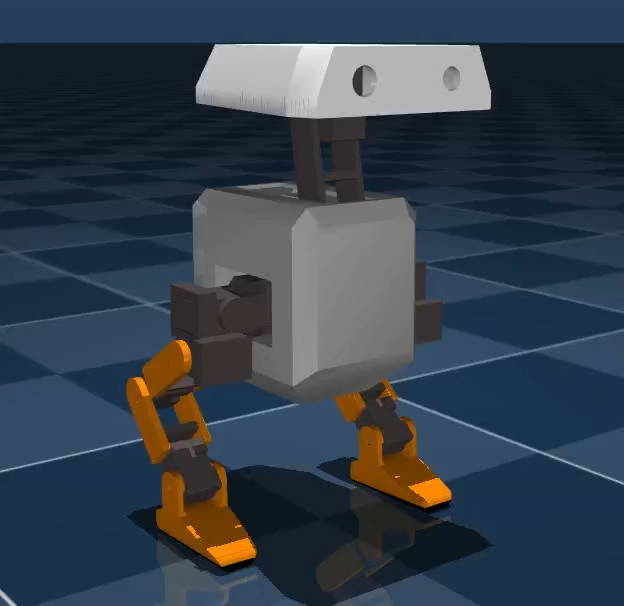
SpotMicro

For robotics enthusiasts keen on quadruped robots, the SpotMicro DYNAMIXEL project offers a comprehensive guide to creating your own SpotMicro robot. This project integrates Robotis DYNAMIXEL and provides a full tutorial to guide you through building this quadruped robot at home.
One of the strengths of the SpotMicro DYNAMIXEL project is its comprehensive documentation simplifying the process of learning and understanding the quadruped robot's structural and movement mechanisms.
With the project's 3D printer modeling files, you can print and assemble your SpotMicro robot, following the step-by-step instructions and assembly descriptions available on Notion. The project also provides a thorough guide on assembling electronic parts, with further links to important resources like the DYNAMIXEL SDK. Once you're familiar with the robot's structure and kinematics, you can actually make your robot walk using keyboard operations. The project even offers pose stabilization, an essential feature for quadruped robots.
The SpotMicro DYNAMIXEL project is part of a wider community and is forked from FlorianWilk's Jetson Nano SpotMicro Project. It encourages collaborations and learning exchanges among robotics enthusiasts. So, whether you're seeking a challenge like making your SpotMicro robot dance or looking to engage with a vibrant community of robotics enthusiasts, the SpotMicro DYNAMIXEL project is a great starting point. Detailed documentation, community forums, and real-time Q&A on Slack are just a few resources available to support you in your robotics journey.
Hexapod Robot
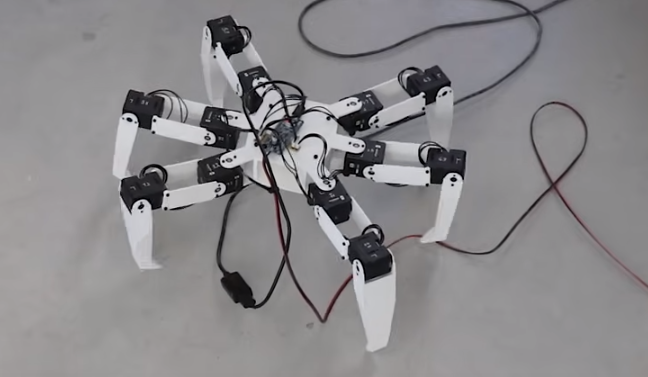
Kris, a robotics enthusiast, shares his exciting journey of creating a programmable Hexapod in a video that emphasizes the importance of simulation in robotic development. Unlike his previous projects, this endeavor required less workshop time and instead, a focus on forward kinematics and software development.
Despite the intimidating appearance of inverse kinematics programming, Kris breaks down the process into manageable 2D problems, making it attainable even for beginners in robotics programming. This approach also eliminates the hassles associated with real-time robot adjustments. Even with real-time monitoring of motor speed and acceleration, Kris built a fully functional Hexapod model without any expenditure. This project showcases how simulation and programming can serve as an excellent starting point for those interested in robotics.
The computer-designed Hexapod can then be brought to life using a 3D printer, Kris's Hexapod stands as a testament to the power of simulation in robotics, providing an accessible and cost-effective entry point into this fascinating field. He generously shares all relevant links and information for those interested in embarking on a similar adventure in the world of robotics.
As we continue to explore the potential of home robotics, these projects illustrate the vast possibilities that exist within reach of our living rooms. From the technologically advanced ALOHA 2 system empowering bimanual teleoperation, the fun and engaging Mini BDX Droid project that brings a touch of Hollywood into our homes, the versatile TurtleBot3 Friends letting us experiment with different robot forms and functions, to the SpotMicro DYNAMIXEL project that opens the door to quadruped robot construction and the intricacies of robotics simulation demonstrated by Kris's Hexapod Robot - all of these projects underscore the practicality, adaptability, and innovation embedded in today's robotics.
Each of these projects not only provide an engaging challenge for aspiring robot builders but also give us a glimpse into the future of everyday robotics. They demonstrate that with components like DYNAMIXEL actuators, the right resources, and a touch of imagination, robotics enthusiasts of all levels can transform their homes into personal robotics laboratories, pushing the boundaries of what's possible with modern robotics. So, why wait for the future when you can create it today in your own home? Happy building!