


New Ecosystem Bundle: House of Dextra
Posted by Mason Knittle on 15th May 2026
House of Dextra: Open-Source Dexterous Hands Powered by DYNAMIXEL
An exploration of modular robotic hands, cross-embodied dexterity, sim-to-real co-design, and the DYNAMIXEL-powered hardware ecosystem behind House of Dextra.
|
SECTION 01
Cross-Embodied Dexterity
|
SECTION 02
Hand Variants
|
SECTION 03
Build Guide
|
SECTION 04
DYNAMIXEL Integration
|
CONCLUSION
Build the Hand
|
Designing Hands and Control Policies Together
House of Dextra explores one of the biggest challenges in robotics: how should we design robot hands for dexterous manipulation? Instead of treating hardware and control separately, the project approaches dexterity as a co-design problem where morphology, actuation, and policy all influence each other simultaneously.
The House of Dextra framework was created by researchers at UC San Diego and UC Santa Barbara as an open-source dexterous hand platform capable of sim-to-real deployment in under 24 hours. The associated research paper describes a cross-embodied co-design framework that jointly optimizes robotic hand morphology and dexterous control policies across multiple embodiments.
Instead of optimizing a single fixed robot hand, House of Dextra evaluates families of manipulators with different finger counts, palm layouts, and kinematic structures. The result is a modular research platform capable of exploring how morphology itself affects dexterity.

3-Finger, 4-Finger, and 5-Finger Variants
House of Dextra was intentionally designed as a modular robotic hand ecosystem rather than a single fixed embodiment. The platform supports multiple hand variants with different finger counts and kinematic structures.
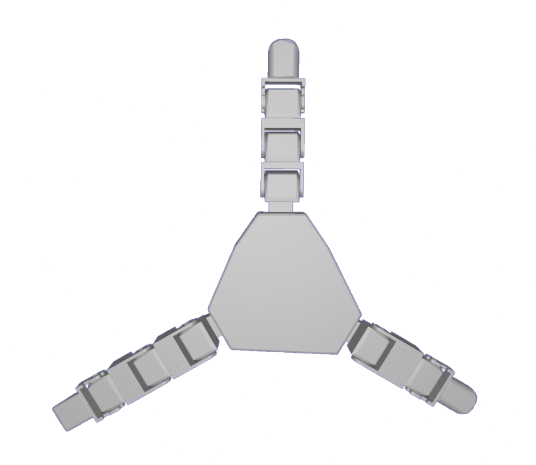
3-FINGER
Minimal Dexterity
Reduced actuator count and simplified kinematics make the 3-finger version ideal for rapid iteration and lower-complexity manipulation experiments.
|
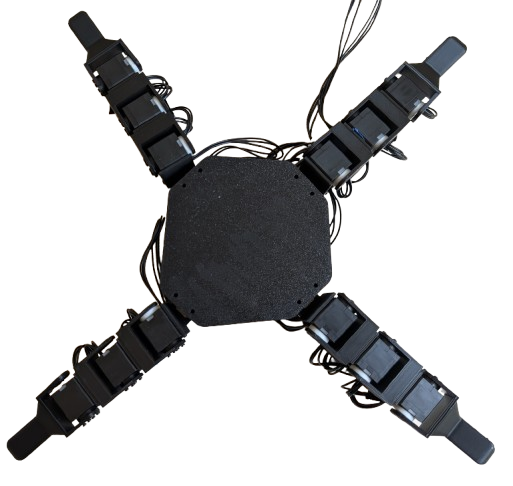
4-FINGER
Balanced Complexity
A middle-ground embodiment balancing dexterity, hardware complexity, and controllability.
|
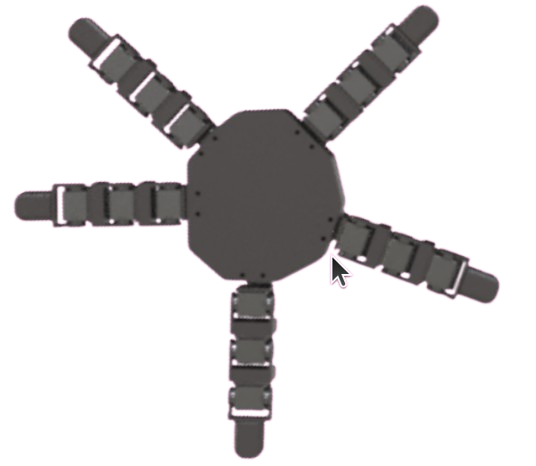
5-FINGER
Full Dexterity
The most anthropomorphic configuration with richer in-hand manipulation capabilities and more complex contact strategies.
|
The 3-finger, 4-finger, and 5-finger variants help researchers study how physical embodiment changes manipulation behavior. A reduced-finger hand lowers cost and complexity, while a 5-finger hand gives the system a richer set of contact strategies for in-hand manipulation.
Because the entire platform is modular and open-source, builders can experiment with different finger counts, palm geometries, and fingertip structures while remaining within a shared DYNAMIXEL ecosystem.
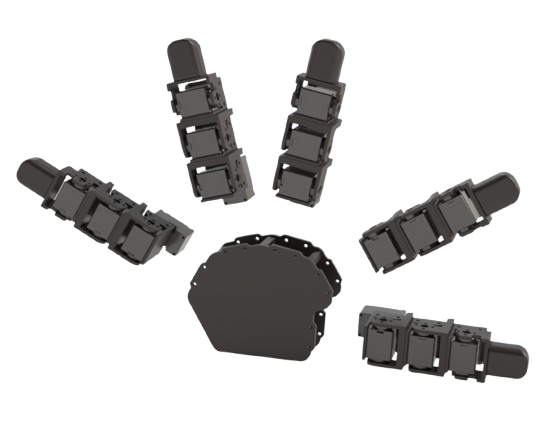
From Printed Parts to a Working Robotic Hand
The official House of Dextra build guide walks through the practical hardware process, including bill of materials, printing, finger assembly, electronics, calibration, deployment, and adaptation.
The baseline 5-finger build uses 20 DYNAMIXEL XL330-M288-T actuators. Reduced-finger variants lower the actuator count and make it easier to prototype different embodiments before committing to a full hand.
The build guide covers printed palm components, servo holders, lever holders, washers, fingertips, DYNAMIXEL ID assignment, cable routing, U2D2 connection, expansion boards, and joint limit setup. This makes the platform approachable for researchers and builders who want a reproducible starting point.
|
STEP 01
Print Parts
Print the palm, holders, washers, links, and fingertips.
|
STEP 02
Assemble Fingers
Build each modular finger chain around the XL330 actuators.
|
STEP 03
Wire System
Daisy-chain actuators and connect through expansion and U2D2 hardware.
|
STEP 04
Deploy
Assign IDs, verify motion, tune gains, and set joint limits.
|
Compact Actuation with XL330 and XC330
The baseline House of Dextra build uses DYNAMIXEL XL330-M288-T actuators, enabling dense finger actuation inside compact modular hand geometries. Builders looking for additional durability or alternative voltage configurations can also explore the XC330 series.
The standard 5-finger configuration uses 20 DYNAMIXEL XL330-M288-T actuators. This actuator choice is central to the platform because dexterous robotic hands require many compact joints operating within extremely constrained mechanical envelopes.
For builders who want a more robust compact actuator option, the XC330-M288-T provides a compatible metal gear alternative, while the XC330-T288-T offers a compact 12V-class option for higher-voltage systems.
|
STANDARD BUILD
XL330-M288-T
Compact and lightweight for the baseline House of Dextra platform.
|
MORE ROBUST OPTION
XC330-M288-T
Metal gear alternative for builders wanting additional durability.
|
12V OPTION
XC330-T288-T
Compact 12V-class actuator option for higher-voltage systems.
|
Build the Hand with the ROBOTIS House of Dextra Bundle
To make hardware sourcing easier, ROBOTIS offers a dedicated House of Dextra actuator bundle containing the core DYNAMIXEL components used for the baseline platform.
The bundle includes 20 DYNAMIXEL XL330-M288-T servos, Robot Cable-X3P cables, expansion boards, a U2D2 communication interface, and the U2D2 Power Hub Board Set. The package is designed to pair directly with the publicly available House of Dextra documentation, CAD files, and software.
This makes the bundle particularly valuable for robotics researchers, educators, students, and developers who want to begin experimenting with dexterous robotic hands without spending time individually sourcing every actuator and communication component.
|
INCLUDED
20 Servos
DYNAMIXEL XL330-M288-T
|
INCLUDED
X3P Cables
Robot Cable-X3P 180mm set
|
INCLUDED
Expansion
3P JST expansion boards
|
INCLUDED
U2D2
Communication interface
|
INCLUDED
Power Hub
U2D2 Power Hub Board Set
|
House of Dextra was created by Kehlani Fay, Darin Djapri, Anya Zorin, James Clinton, Ali El Lahib, Hao Su, Michael T. Tolley, Sha Yi, and Xiaolong Wang from UC San Diego and UC Santa Barbara.