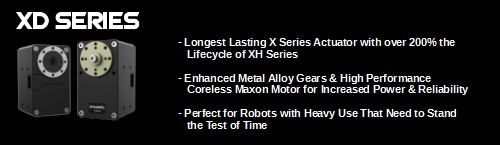
DYNAMIXEL-X



![]()
DYNAMIXEL X-Series is a new line-up
of high performance networked actuator module,
which has been widely used for building multi-joint robots
with reliability and expandability.

Basic Features
▪ Improved Torque, Compact Size
▪ Enhanced Durability and Expandability
▪ Hollow Back Case Minimizes Cable Stress (3-way-routing)
▪ Direct Screw Assembly to the Case (without Nut Insert)
▪ Improved Heat Sink Featuring an Aluminum Case
Various Control Functions
▪ 6 Operating Modes
▪ Current-Based Torque Control (4096 steps, 2.69mA/step)
▪ Profile Control for Smooth Motion Planning
▪ Trajectory Data and Moving Status (In-Position, Following Error, etc.)
▪ Energy Saving (Reduced Current from 100mA to 40mA)

Sophisticated Control Architecture
▪ Various feedback and control method according to developers’ needs
▪ Protocol 2.0 provides reliable packet communication

New H/W Architecture
▪ Improved Torque, Compact Size

▪ Compact Design
▪ Direct Screw Assembly to the Case (without Nut Insert)

▪ Aluminum Case: Improved Heat Sink Featuring & Enhanced Durability

▪ Hollow Back Case Minimizes Cable Stress
▪ Cable cover can Prevention Cable Separation

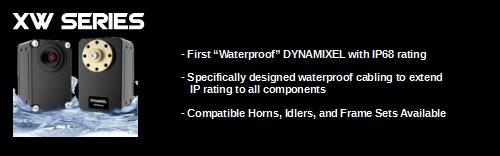
Waterproof DYNAMIXEL
▪ XW Series Waterproof, IP68 (1m, 24hr)
▪ Waterproof Cable, Hollow Structure
▪ Normal Cable, Extension Cable
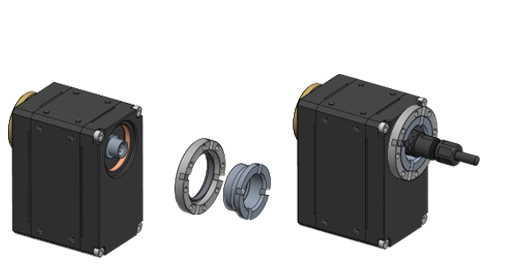



2-Axis DYNAMIXEL
▪ Control 2-Axis(2 DOF) with a single module
▪ Reduced weight and volume compared to using two modules
▪ Used for the robot's neck, shoulders, hips, wrists, and ankles


Weight, Volume Comparison


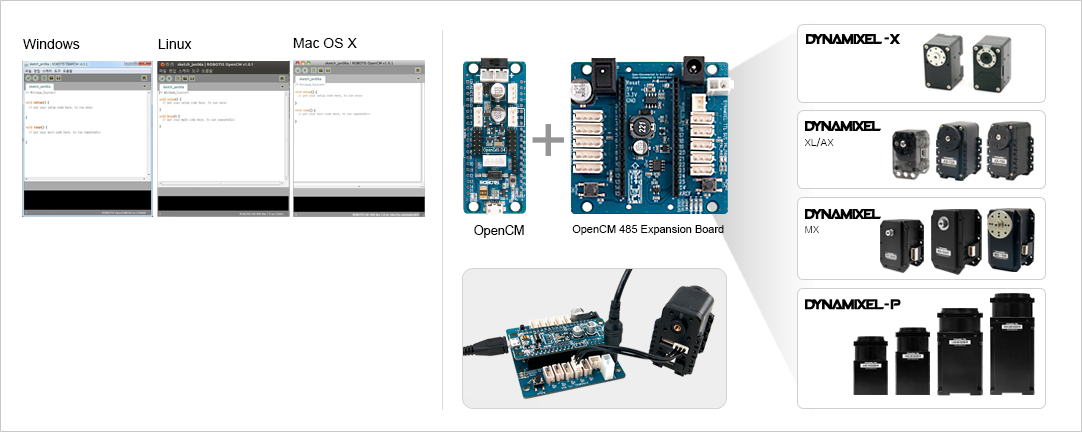
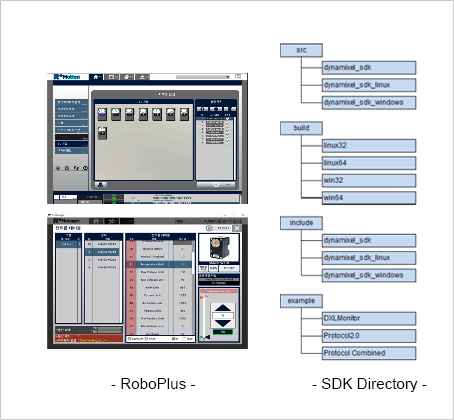
Development Environment
- GUI version
- RoboPlus Task 2.0
- RoboPlus Motion 2.0
- RoboPlus Manager 2.0 - SDK 3.0
- C(Win / Linux)
- C++(Win / Linux)
- Python
- LabView
- Matlab
- JAVA
- C#

Compatible Device
▪ PC + USB2Dynamixel


▪ Embedded Board
- OpenCM Series
- 3rd Party Board