

![OMX-AI [US]](https://cdn11.bigcommerce.com/s-76o5u/images/stencil/1280x1280/products/724/1945/tn_OMX__96242.1758133578.png?c=2 "OMX-AI [US]")
![OMX-AI [US]](https://cdn11.bigcommerce.com/s-76o5u/images/stencil/100x100/products/724/1945/tn_OMX__96242.1758133578.png?c=2 "OMX-AI [US]")
Product Description
Important Camera Notice
This bundle does NOT include a camera for the OMX-F Follower Arm.
A compatible camera can be purchased separately: Camera Information →
System Requirements & Prerequisites
Please review these requirements before setting up OMX with Physical AI Tools.
| Category | Requirement |
|---|---|
| Recommended OS | Ubuntu |
| Host Operating System | Any Linux distribution. The host OS version does not need to match the container. |
| Container Environment | Ubuntu 24.04 + ROS 2 Jazzy |
| GPU | NVIDIA GPU with CUDA support |
| Required Software | Docker Engine, Git, and NVIDIA Container Toolkit |
| Recommended Setup Knowledge | Basic Linux terminal, Docker, ROS 2, and USB device/serial port setup |
Overview
The OMX is an entry-level Physical AI manipulator designed for dataset collection, teleoperation, and imitation learning. It provides an accessible platform for users who want to collect robot motion data, operate a leader/follower arm system, and begin working with Physical AI workflows.
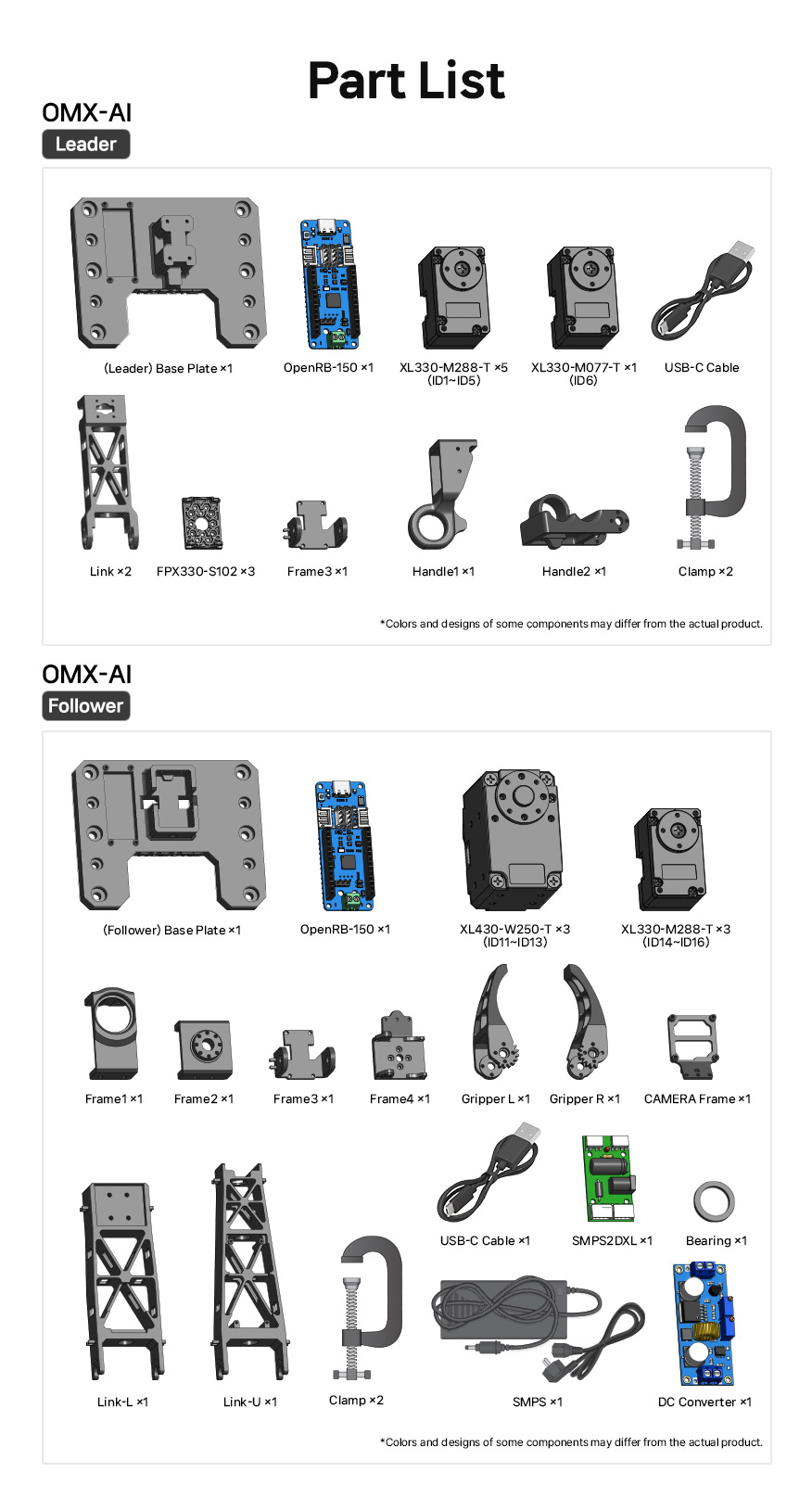
This bundle includes:
- OMX-L Leader Arm
- OMX-F Follower Arm (camera not included)

Key Features
Physical AI Ready
- Designed for dataset collection, teleoperation, and imitation learning workflows
- Supports Physical AI Tools for web-based operation and data management
- Training and inference examples are available for users getting started with robot learning
Open-Source Robotics Platform
- ROS 2 compatible
- Supports MoveIt 2, Gazebo, and other common robotics development tools
- Built around the ROBOTIS open manipulator ecosystem
Research-Friendly Design
- Affordable entry point for Physical AI, robotics education, and research labs
- Expandable with the ROBOTIS DYNAMIXEL ecosystem
- Serviceable platform for repeated testing, iteration, and development
Hardware Overview
OMX-L Leader Specifications
| Item | OMX-L Leader |
|---|---|
| Degrees of Freedom | 5 + Gripper |
| Full Reach | 335 mm |
| Weight | 360 g |
| Voltage | 5 VDC |
| Communication | USB-C / TTL |
| Baudrate | 1 Mbps |
| Software | ROS 2 |
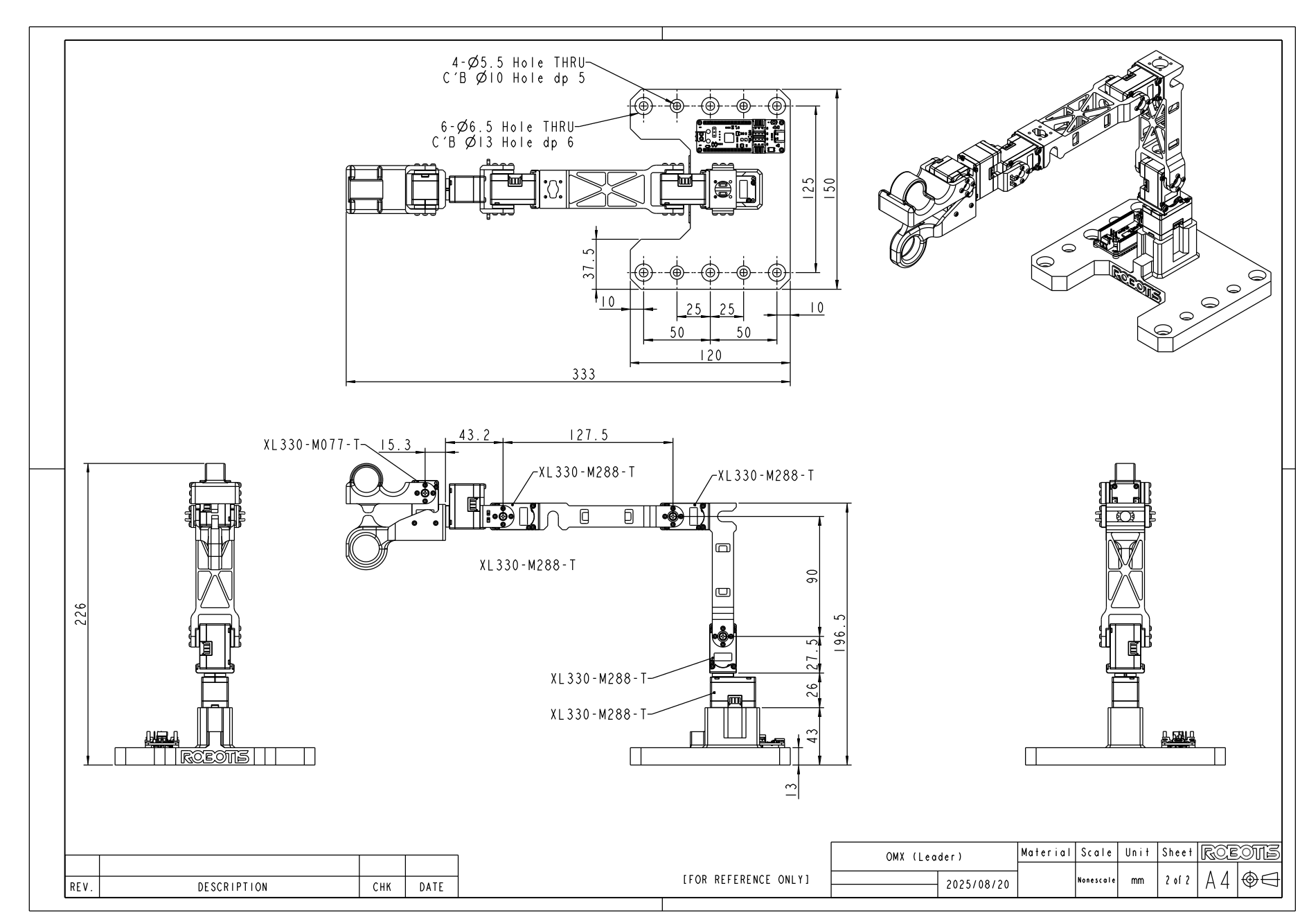
OMX-L Leader Drawing Files
OMX-F Follower Specifications
| Item | OMX-F Follower |
|---|---|
| Degrees of Freedom | 5 + Gripper |
| Full Reach | 400 mm |
| Weight | 560 g |
| Voltage | 12 VDC |
| Payload | 100 g full reach / 250 g normal operating range |
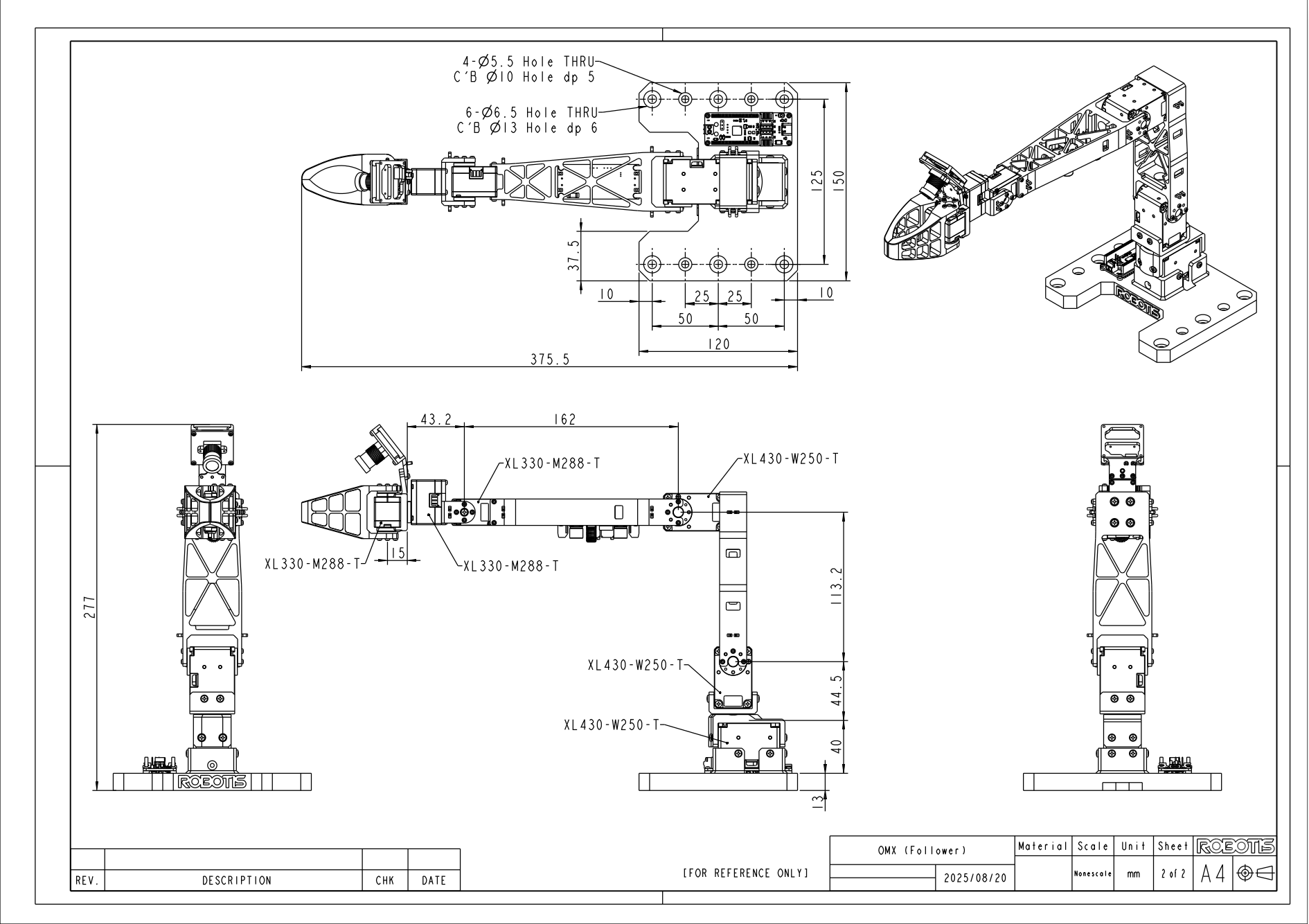
OMX-F Follower Drawing Files
Getting Started
Before operation, users should complete the OMX assembly and software setup guides. For Physical AI workflows, users should also complete the ROS 2 Physical AI Tools setup guide, including Docker, NVIDIA Container Toolkit, serial port configuration, and camera topic configuration.
Videos
OMX Introduction
Tutorials & Demonstrations
Resources
```
