

OMX
OMX is a 5-DOF robotic manipulator designed for Physical AI research. It enables teleoperation, trajectory learning, and deployment of AI policies through a unified ROS 2 control architecture.
With its high-torque DYNAMIXEL-X actuators and modular hardware design, OMX provides a versatile platform for a wide range of research tasks. Users can integrate cameras, force sensors, and other peripherals to create custom setups, enabling experiments that combine perception, learning, and motion control. Its precision joint-level control ensures reliable execution of complex trajectories and repeatable experiments in both lab and industrial settings.
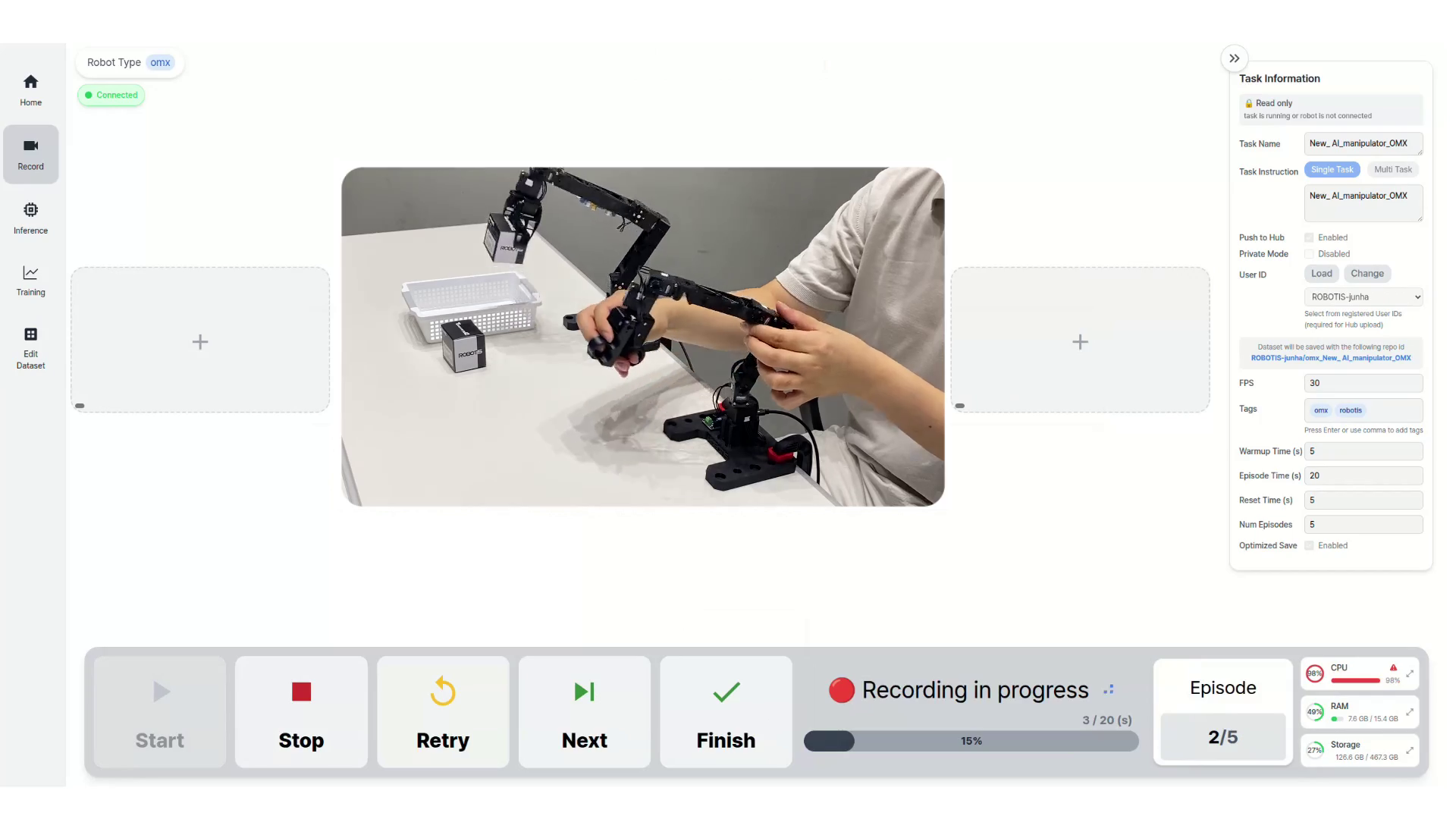
The manipulator also supports real-time teleoperation and AI-driven workflows, allowing researchers to record, playback, and refine motion sequences while testing AI policies in physical environments. Its ROS 2 integration provides seamless access to open-source packages, simulation tools, and development frameworks, accelerating experimentation and reducing setup time for new research projects.
Compact yet robust, OMX balances high performance with a small footprint, making it suitable for tabletop setups, collaborative research spaces, and educational labs. Its combination of modular hardware, AI-ready control, and precision motion capabilities makes it an ideal choice for teams seeking a flexible platform to advance the study of Physical AI, robotics, and intelligent manipulation systems.
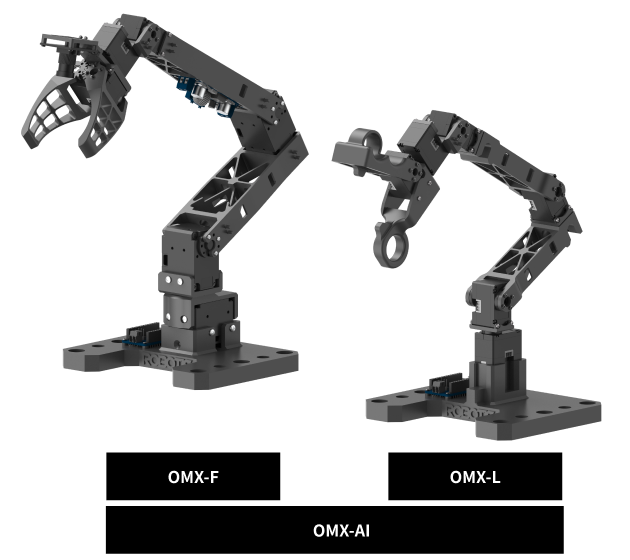
Compact 5-DOF Design
Small footprint manipulator ideal for tabletop setups, yet capable of precise AI-driven operations.
Real-Time ROS 2 Control
Runs on ROS 2 Jazzy with ros2_control for joint-level control at 100Hz.
AI-Enabled Motion
Supports teleoperation, trajectory learning, and execution of AI-generated or predefined motion plans.
Modular Hardware & Software
DYNAMIXEL-X actuators, TTL communication, and open-source ROS 2 packages provide flexible development options.
Motion & AI Pipeline
OMX processes teleoperation or AI-generated commands through ros2_control, which controls DYNAMIXEL-X actuators in real time for precise joint-level execution.
- Teleoperation and trajectory recording
- AI model training and deployment
- Joint-level execution at 100Hz with ROS 2
Hardware Designed for Research
OMX combines high-torque actuators, compact 5-DOF design, and optional sensors for versatile Physical AI research in lab and industrial environments.
Precise 5-axis motion for research tasks and trajectory learning.
High-performance servo motors with TTL communication for reliable motion.
Modular joint control supports multiple controllers, teleop, and AI-based motion strategies.
Integrates with cameras or force sensors for perception and interactive experiments.