



Product Description
*This item is currently backordered. Please email us at america@robotis.com to get more information on the lead time.
Package Contents
| Item | Quantity | Description |
|---|---|---|
| XD540-T150-R | 1 | DYNAMIXEL Servo |
| HN13-N101 | 1 | Servo Horn |
| Robot Cable-X4P 180mm | 1 | RS485 4p Cable (JST-JST) |
| Robot Cable-X4P (Convertible) 180mm | 1 | RS485 4p Cable (MOLEX-JST) |
| Robot Cable-3P-Sync 160mm | 1 | Dual Joint Mode Cable |
|
Wrench Bolt WB M2.5x5
|
16 | For frame installation |
| Wrench Bolt WB M2.5x4 | 10 | For horn & frame installation |
| Wrench Bolt WB M3x8 | 1 | For frame installation |
| Spacer Ring | 8 | For frame installation |

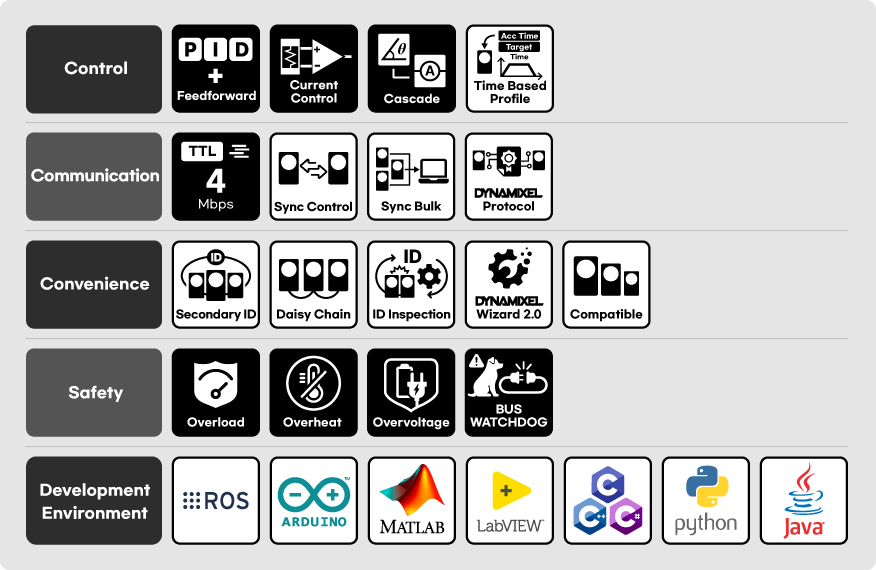
Supported Features

|
| Feedback Type | XD430 | XD540 |
|---|---|---|
| Position | ✓ | ✓ |
| Velocity | ✓ | ✓ |
| Current | ✓ | ✓ |
| PWM | ✓ | ✓ |
| Input Voltage | ✓ | ✓ |
| Temperature | ✓ | ✓ |
| Realtime tick | ✓ | ✓ |
| Trajectory | ✓ | ✓ |

