



Product Description
This product is made to order. The import tariffs have been included in the price. Please email america@robotis.com for a quote.
OMY-L100 Leader
The OMY-L100 serves as the leader device in the OMY teleoperation system, engineered specifically for imitation learning and advanced human-in-the-loop robotic control. Its lightweight, ergonomic design provides intuitive 6-DOF input, enabling operators to naturally replicate arm and hand motions for real-time robot guidance. By capturing high-resolution motion data and transmitting it with minimal latency over Ethernet, the OMY-L100 ensures precise, responsive control of the OMY-F3M follower arm. Optimized for comfort and accuracy, it’s the ideal tool for training AI systems in complex manipulation tasks through a master-slave control architecture.
[Leader] Hardware Overview

| Item | OMY-L100 |
| DOF | 6 |
| Reach | 560 [mm] |
| Weight | 1.46 [kg] |
| Operating Voltage | 12 [VDC] |
| Joint Resolution | -π(rad) ~ π(rad), -2,048 ~ 2,048 [pulse/rev] |
| Joint Range | Joint 1 : ±180° |
| Joint 2 : -70° ~ +100° | |
| Joint 3, 4, 5, 6 : ±180° | |
| Joint 7 : -90° ~ +60° | |
| DYNAMIXEL-Y Specification | Joint 1, 2, 3 : XH540-W150-T |
| Joint 4,5,6 : XC330-T288-T | |
| Joint 7 : XC330-T181-T | |
| Host Interface | U2D2 (USB 2.0) |
| Internal Communications | TTL Multidrop Bus |
| Communication Baudrate | 4 [Mbps] |
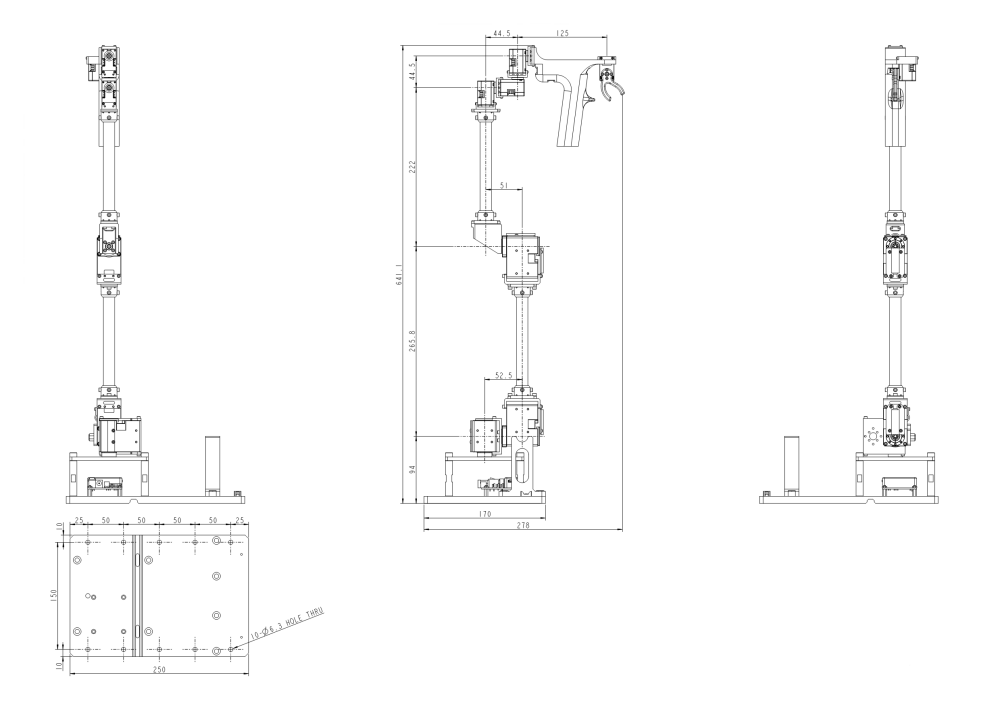
[Leader] Layout
What is a "Leader" used for?
Leader arms are used in teleoperation systems to allow operators to intuitively control a robotic "follower" arm by physically guiding a mirrored device. These leader arms capture the operator’s hand and arm movements—often in six degrees of freedom (6-DOF)—and translate them into precise motion commands for the remote or virtual robot.
They are commonly used in applications such as:
- Imitation learning, where robots learn manipulation tasks by observing human demonstrations.
- Remote manipulation, such as handling hazardous materials or performing tasks in environments unsafe for humans.
- Human-robot collaboration, where the leader arm helps teach robots how to interact with objects or tools in unstructured environments.
- Surgical training and assistance, where fine motor control and real-time feedback are critical.
By providing natural, gesture-based input and real-time responsiveness, leader arms serve as powerful interfaces for training, guiding, and refining robotic behaviors in both research and real-world deployments.
Link
- AI OMY - Technical Resources
