OpenMANIPULATOR-P
![]()
Multi-Purpose Affordable Manipulator
for Research and Education

What is “Open Manipulator-PRO”?
ROBOTIS provides open-source CAD, software, hardware design, and public resources for development of robotic manipulator arms.

Highlights
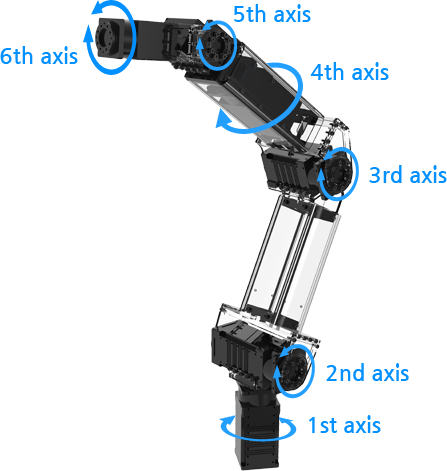
▪ 6 DOF (Built with DYNAMIXEL PRO PLUS)
▪ ROS environment for User Programming
▪ Modular Structure for Ease of Maintenance
▪ Continuous Payload Suitable for Small to Mid-scale Operations
▪ RS-485 Communication Bus
▪ Control via Computer Using USB Interface or Arduino & ROBOTIS Embedded Controllers

Specifications
|
Product Name |
OpenMANIPULATOR-PRO |
|
Model Name |
RM-P60-RNH |
|
DYNAMIXEL PRO |
H54P-200-S500-R x2 H54P-100-S500-R x2 H42P-20-S300-R x2 |
|
DOF |
6 |
|
Payload (kg) |
3 |
|
Repeatability (mm) |
±0.05 |
|
Speed (Each joint, deg/sec) |
180 |
|
Weight (kg) |
5.5 |
|
Reach (mm) |
645 |
| Rated Voltage (VDC) | 24 |
| Communication | RS-485 (Multi Drop Bus) |
| Software | ROS (Ubuntu Linux) |
| Controller | PC (Not Included) |
Actuator Arrangement & Mechanical Structure
Dimensions

Workspace Reach and Footprint

Examples of Use

Pick & Place with ROBOTIS Robot Hand (RH-P12-RN)

Dual Manipulation System
Development Environment

- Overview
- Specification
- Getting Start
- [ROS] Setup
- [ROS] Manipulator Manager
- [ROS] Operation
- [ROS] Simulation
- ROS Package